 400 025 3599
400 025 3599 




六自由度平臺具有剛度好、定位精度高、承載能力大的特點,已廣泛應用于車輛運動模擬中。高頻振動由抖振座椅實現,座椅激振器采用液壓例服激振器,車輛模擬器運動模擬原理如圖所示,共分為個環(huán)節(jié):路面和地形建模;車輛實時動力學模型;參數濾波分解;動感模擬算法;六自由度平臺運動變換及運動學反解;六自由度平臺和抖振座椅運動實現。
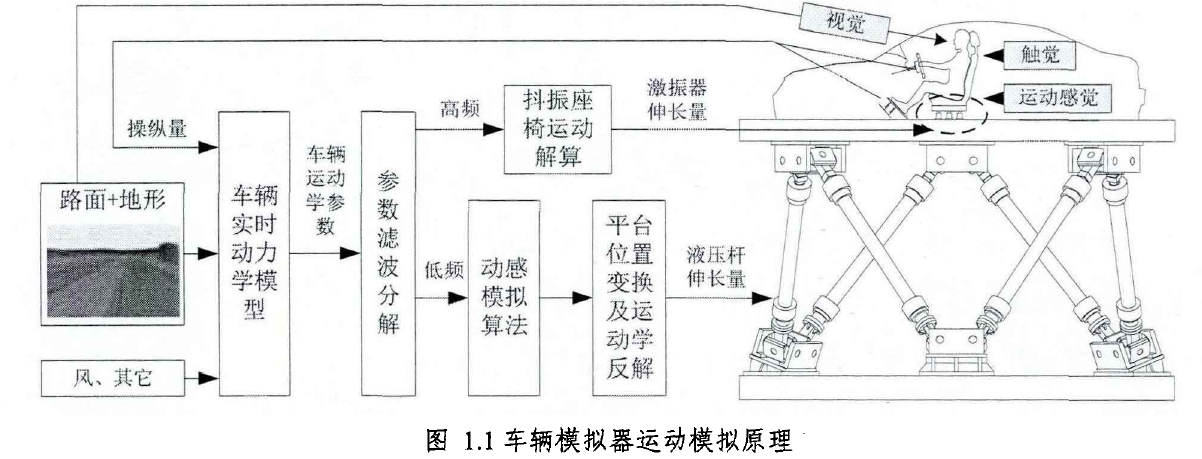
1、路面和地形建模,車輛是在路面(地面)上運動的,路面不但是乘員視覺觀察的主要對象,同時也是車輛運動最主要的外界激勵,車輛實時動力學模塊釆用三維虛擬路面和地形模型,因此路面和地面模型能否真實反映出路面的特性是車輛模擬器視景模擬、動力學模型研究、運動和振動模擬、方向盤路感反饋模擬、噪聲模擬準確性的前提。
2、車輛實時動力學模型,車輛實時動力學模型根據路面模型、駕駛員操縱輸入信號(如轉向盤轉角、油門踏板轉角、制動踏板轉角等)進行車輛狀態(tài)的實時解算,得到車輛的運動學、動力學參數,如速度、加速度、角速度、角加速度、車輛懸架狀態(tài)、轉向盤反饋力等。車輛實時動力學模型在滿足實時性的同時應盡可能的提高解算的精確性,視景系統、聲效模擬系統、操縱模擬系統、觸感反饋系統、儀器儀表模擬系統都要從車輛動力學模型中獲取數據,車輛實時動力學模型是車輛模擬器的核心。
3、參數濾波分解,由于車輛高、低頻運動分別由六自由度平臺和抖振座椅模擬,因此必須將車輛實時動力學解算出來的參數在車輛坐標系的垂向進行高低頻分解。
4、動感模擬算法,由于六自由度平臺運動空間的限制,使其不能完全模擬車輛的運動,必須使用動感模擬算法,又稱動感模擬算法(,將車輛的運動學參數(加速度、角速度)進行濾波、限幅等一系列處理。即使車輛動力學模型解算出的數據再準確,如果動感模擬算法處理不當,會使得六自由度平臺的運動和期望的的運動相差很大,甚至形成的錯誤的運動暗示,造成模擬器疾病和不適,達不到模擬的效果,因此,動感模擬算法是運動模擬的關鍵。
5、平臺運動變換及運動學反解,由于動感模擬算法的輸入可以是車輛質心的運動學參數,也可以是車輛上其它點的運動學參數,因此必須依據車輛、模擬器座艙、平臺三者之間的關系進行運動變換,然后求取平臺的運動學反解,得到六個液壓分支的伸長量,平臺運動變換及運動學反解是平臺運動控制的輸入參照條件。
6、六自由度平臺和抖振座椅運動實現,平臺的軟件硬件系統根據六個液壓缸的伸長量,控制液壓缸的運動,進而得到上平臺的運動,抖振座椅實現車輛垂向高頻運動,車輛乘員感受模擬座槍及座椅的運動,實現車輛運動的模擬,六自由度平臺和抖振座椅運動實現是車輛模擬器運動模擬的保障。
上述六個環(huán)節(jié)環(huán)環(huán)相扣、缺一不可,各環(huán)節(jié)相互協同完成車輛運動的模擬。才能模擬車輛真實運行工況下車輛乘員體驗到的運動振動感覺、視覺、聽覺、觸覺等外部刺激,營造一個逼真的、沉浸感強的模擬環(huán)境。








 在線咨詢
在線咨詢 




