 400 025 3599
400 025 3599 




六自由度并聯運動平臺ACE6 TecPlat由Mechanics機械本體和Servos伺服控制系統組成。機械本體設計的優劣直接決定了平臺工作空間、帶載能力、運動穩態精度等性能,而良好的伺服控制系統TecLab設計則是確保平臺達到其設計性能指標的基礎,甚至能夠在一定程度上提高平臺的運動性能。運動平臺由如圖所示的七部分組成:
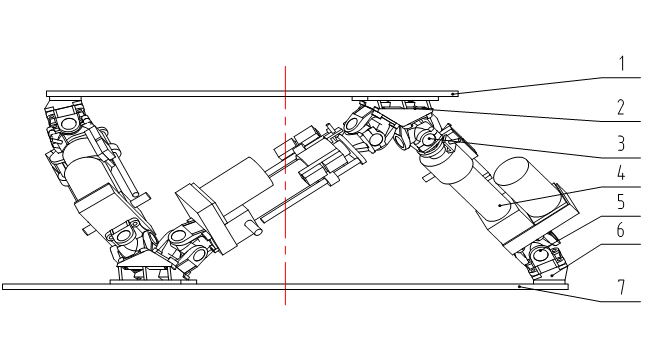
圖3.2.1 運動平臺機械結構圖
1平臺上底板、2上鉸支座連接座、3上鉸支座組件、4電動缸組件、5下鉸支座組件、6下鉸支座連接座、7平臺下底板。
3.2.2 框架和鉸接件
ACE6平臺系統由采用TecPlat Stewart機構的六自由度運動平臺方式。六自由度運動平臺的下平臺安裝在地面上。其中上平臺為運動平臺,它由六只電動缸支承,運動平臺與電動缸采用12個虎克鉸連接,上下平臺與虎克鉸之間采用六個固定基座做橋接。
上平臺是有效載荷的安裝基面,其提供六自由度的搖擺運動。下平臺是TecPlat六自由度運動平臺的安裝基面,需要有足夠的強度和承受足夠大的沖擊力。
下平臺采用型鋼焊接,確保尺寸足以支撐上層整體結構,不會出現頭重腳輕等傾覆性安全隱患。設計有聯結定位鋼板,加強平臺的聯結強度及定位精度,盡量避免以面與地面接觸,采取點或線的接觸方式,降低對用戶地面平整度的依附。考慮了多種與地面聯結固定方式,既能通過下平臺與預埋的高強度地腳螺栓固聯,也可通過包角,壓重等方式固定,確保運動平臺安全可靠的運行。
TecPlat平臺結構示意圖如圖3.2.1,它由下臺基、上平臺及并聯連接兩者的6個電動缸組成,Mechanic電動缸與上、下平臺之間分別采用球鉸/虎克萬向鉸連接(圖3.2.2),6個電動缸可在缸軸向方向作線性移動,平臺正是通過6個電動缸的協調動作來實現6自由度的運動。整體框架如圖3.2.4所示。


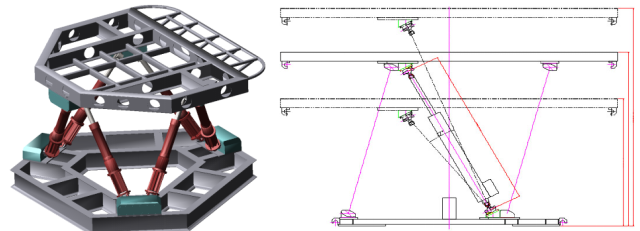
圖3.2.1 平臺結構示意圖
TecPlat六自由度運動平臺共有六組鉸支座,三組上鉸支座,三組下鉸支座。鉸支座應承載能力強、擺動角度大、配合間隙小、傳動穩定、運動靈活、 維護保養方便,設計時對鉸支座中的部分結構件作了優化處理,即不影響鉸支座整體的強度和剛度的同時保證平臺在運動到極限位置時不發生干涉,在此基礎上減輕整個鉸支座的重量,縮小體積,使鉸支座運動更靈活,傳動更穩定。必須選用軸承動、靜負荷容量指標高的鉸支座軸承保證質量。

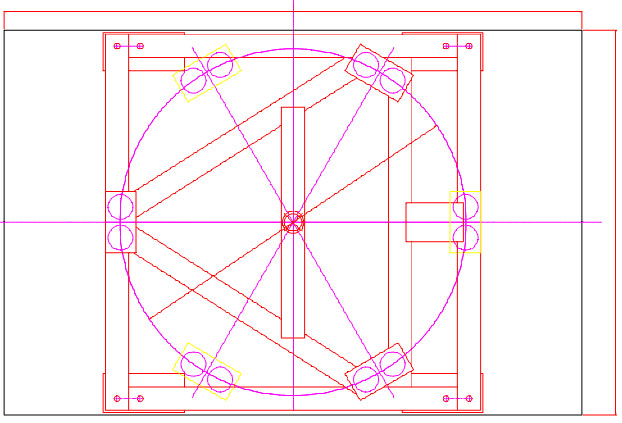
圖3.2.2 平臺鉸接點布置圖



a)球籠聯軸器
采用球籠鉸鏈與上平面連接。球籠鉸鏈結構簡單、體積小、運轉靈活、易于維護。初選球籠鉸鏈型號BJB(JB/T6139-1992),公稱轉矩Tn=2000N/m,工作角度40度,外徑D=68mm,軸孔選用圓柱孔d=24mm,總長度L1=148mm,轉動慣量為0.00008kg.m²,重量5kg。
b)虎克鉸鏈
采用虎克鉸鏈與下平面連接。萬向節鉸鏈傳動效率高,允許兩軸間的角位移大,適用于有大角位移的兩軸之間的連接,一般兩軸的軸間角最大可達35º~45º,噪音小,對潤滑要求不高,傳遞轉矩大,而且使用可靠,因此獲得廣泛的應用。
六自由度平臺的電動缸與上下平臺連接均采用高剛性虎克鉸連接,其運動平穩平滑,剛性好,強度大,免維護。虎克鉸的擺角需要通過大量的演算獲得,動平臺在精調任務空間內靈巧運動時,通過下列數學關系可得到虎克鉸的擺角:



初選深溝球軸承型號61808(GB/T276-1994),額定載荷Cr=5.1kN,外徑D=52mm,軸承孔選用d=40mm,寬B=7mm,重量0.26kg。
初選深溝球軸承型號61802(GB/T276-1994),額定載荷Cr=2.1kN,外徑D=24mm,軸承孔選用d=15mm,寬B=5mm,重量0.005kg。








 在線咨詢
在線咨詢 




