 400 025 3599
400 025 3599 




9.3.1 ACB70x和Delta臺達ASDA-A2-E系列伺服驅動器連接關系_20190708
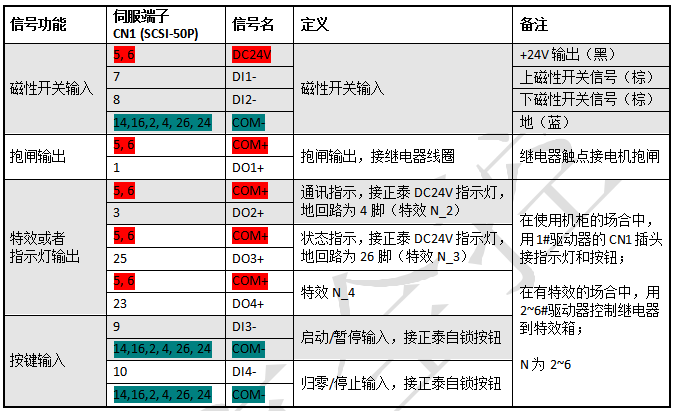
注:
2. 關于負極回路部分:14腳(COM-)和16腳(GND)需要短接起來。如果使用抱閘時,應將2腳(DO1-)也一同短接起來。
3. 1號驅動器注意:如果在使用機柜的場合,應將4、26與14、16一起短接起來。
4. 2~6驅動器注意:如果在使用特效的場合,應將4、26、24與14、16一起短接起來。

特效輸出表:
| 參數號 | 說明 | 備注 |
| 1_1、2_1、3_1、4_1、5_1、6_1 | 6個軸的抱閘控制 | |
| 1_2、1_3 | 控制柜指示燈輸出 | |
| 2_2 | 特效1 | 2號驅動器CN1出線 |
| 2_3 | 特效2 | |
| 2_4 | 特效3 | |
| 3_2 | 特效4 | 3號驅動器CN1出線 |
| 3_3 | 特效5 | |
| 3_4 | 特效6 | |
| 4_2 | 特效7 | 4號驅動器CN1出線 |
| 4_3 | 特效8 | |
| 4_4 | 特效9 | |
| 5_2 | 特效10 | 5號驅動器CN1出線 |
| 5_3 | 特效11 | |
| 5_4 | 特效12 | |
| 6_2 | 特效13 | 6號驅動器CN1出線 |
| 6_3 | 特效14 | |
| 6_4 | 特效15 |
9.2.2 ACB70x-臺達A2/A3-E EtherCAT參數修改_20190112增加剎車電阻
| 參數號 | 說明 | 原來值 | 修改后的數值 | 備注 |
| P1-01 | 控制模式設定 | x | C | 設置成CANOpen模式 |
| P2-14 | 0x102 | 0 | 防止驅動器報錯 | |
| P2-15 | 0x22 | 0 | ||
| P2-16 | 0x23 | 0 | ||
| P2-17 | 0x21 | 0 | ||
| P3-00 | 驅動器地址設置 | 0x7F | 1、2…6 | 每個驅動器分別改成1~6 |
| P1-52 | 回生電阻阻值 | 根據電阻實際參數設置 | 這個必須要設置,否則驅動器會報錯 | |
| P1-53 | 回生電阻功率 | |||

關鍵詞: Delta,臺達,ASDA-A2-E,EtherCAT,系列








 在線咨詢
在線咨詢 




