 400 025 3599
400 025 3599 




“Robots”一詞最早誕生于20世紀20年代,作為20世紀最偉大的發(fā)明之一,機器人在生產(chǎn)生活及其他各個領(lǐng)域的應用已經(jīng)成為一個國家的重要發(fā)展目標。自從20世紀60年代初期美國推出第一臺作業(yè)范圍僅限于上、下料的工業(yè)機器人以來,機器人得到了迅速發(fā)展,并廣泛應用于工業(yè)、服務、醫(yī)療衛(wèi)生和娛樂等許多方面,對人們的生活產(chǎn)生了深遠的影響。現(xiàn)代所說的機器人多指工業(yè)機器人,大都是由基座、腰部、肩部、大臂、小臂、腕部和手部構(gòu)成,由于是以串聯(lián)形式連接,因而也稱為串聯(lián)機器人。就在串聯(lián)機器人蓬勃發(fā)展的時候,又出現(xiàn)了一類全新的機器人——并聯(lián)機器人。與串聯(lián)機器人相比,并聯(lián)機器人具有剛度大、結(jié)構(gòu)穩(wěn)定緊湊、承載能力強、累積誤差小、精度高以及動力性能好等優(yōu)點。它作為串聯(lián)機器人強有力的補充,擴大了整個機器人的應用范圍,引起機器人學理論界和工程界的廣泛關(guān)注,成為機器人研究的主要熱點之一。
1、關(guān)聯(lián)機構(gòu)的提出及特點
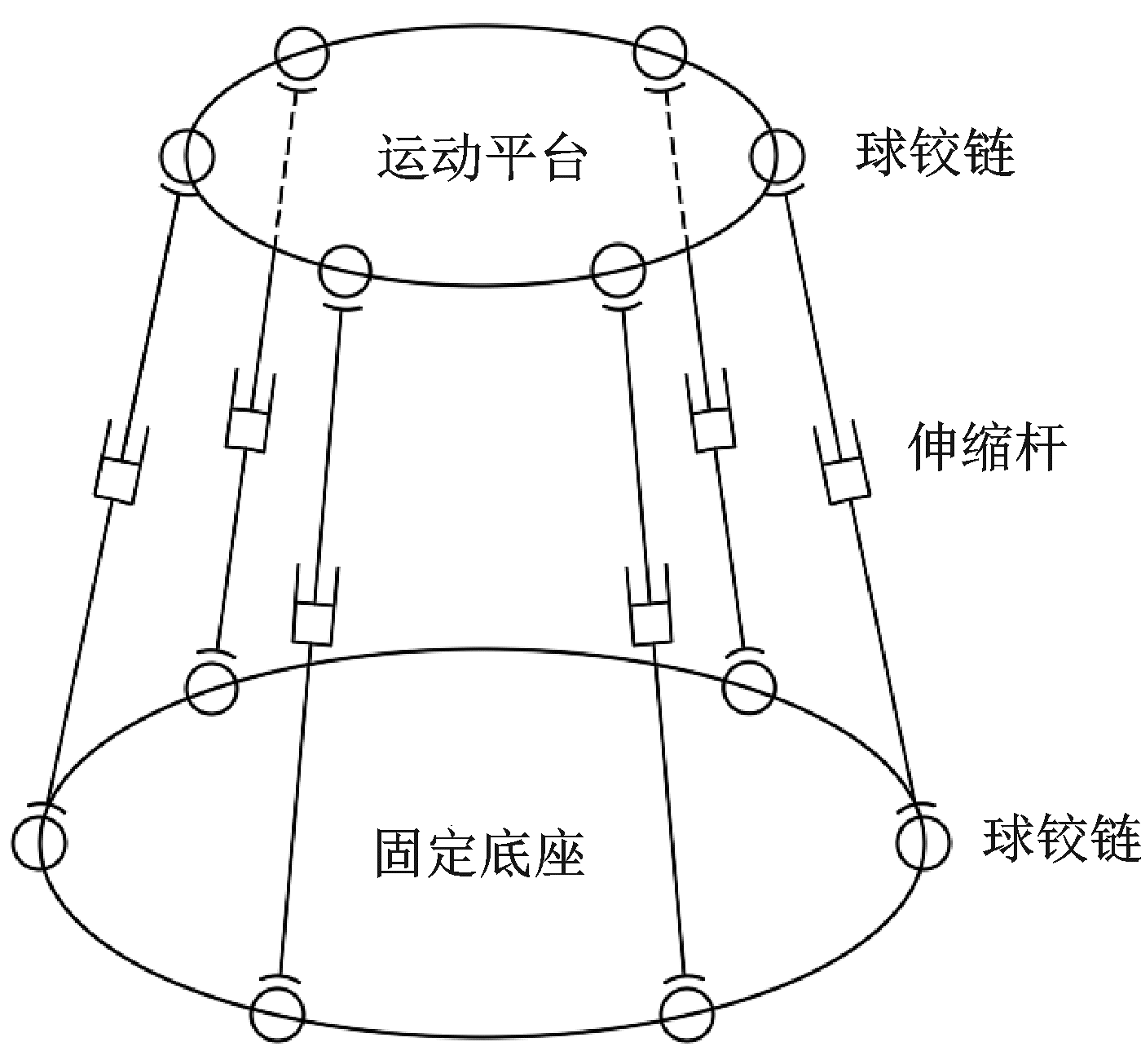
1965年,德國Stewart發(fā)明了六自由度并聯(lián)機構(gòu),并作為飛行模擬器用于訓練飛行員。澳大利亞著名機構(gòu)學教授Hunt于1978年提出將并聯(lián)機構(gòu)用于機器人手臂。隨后,Maccallion和 Pham.D.J首次將該機構(gòu)按操作器設(shè)計,成功的將Stewart機構(gòu)用于裝配生產(chǎn)線,標志著真正意義上的并聯(lián)機器人的誕生,從此推動了并聯(lián)機器人發(fā)展 的歷史。典型的Stewart并聯(lián)機器人如圖1所示。
相對于串聯(lián)機器人來說,并聯(lián)機器人具有以下優(yōu)點:
①與串聯(lián)機構(gòu)相比,剛度大,結(jié)構(gòu)穩(wěn)定;
②承載能力強;
③精度高;
④運動慣性小;
⑤在位置求解上,串聯(lián)機構(gòu)正解容易,反解困難,而并聯(lián)機器人正解困難,反解容易。
由于并聯(lián)機器人的在線實時計算是要求計算反解的,這對串聯(lián)機構(gòu)十分不利,而并聯(lián)機構(gòu)卻容易實現(xiàn),由于這一系列優(yōu)點,因而擴大了整個機器人的應用領(lǐng)域。
2、并聯(lián)機器人的研究現(xiàn)狀
自1987年Hunt提出并聯(lián)機器人結(jié)構(gòu)模型以來,并聯(lián)機器人的研究受到許多學者的關(guān)注。美國、日本先后有Roney、Ficher 、Duffy 、Sugimoto等一批學者從事研究,英國、德國、俄羅斯等一些歐洲國家也在研究。國內(nèi)燕山大學的黃真教授自1982年以來在美國參加了此項內(nèi)容的研究,并于1983年取得了突破性進展。迄今為止,并聯(lián)機構(gòu)的樣機各種各樣,包括平面的、空間不同自由度的、不同布置方式的、以及超多自由度并串聯(lián)機構(gòu)。大致來說,60年代曾用來開發(fā)飛行模擬器,70年代提出并聯(lián)機器手的概念,80年代來開始研制并聯(lián)機器人機床,90年代利用并聯(lián)機構(gòu)開發(fā)起重機,日本的田和雄、內(nèi)山勝等則用串聯(lián)機構(gòu)開發(fā)宇宙飛船空間的對接器。
此后,日本、俄羅斯、意大利、德國以及歐洲的各大公司相繼推出并聯(lián)機器人作為加工工具的應用機構(gòu)。我國也非常重視并聯(lián)機器人及并聯(lián)機床的研究與開發(fā)工作,中國科學院沈陽自動化研究所、哈爾濱工業(yè)大學、清華大學、北京航空航天大學、東北大學、浙江大學、燕山大學等許多單位也在開展這方面研究工作,并取得了一 定的成果。
3、并聯(lián)機器人分類
自1993年,第一臺并聯(lián)機器人在美國德州自動化與機器人研究所誕生以來,并聯(lián)機器人無論在結(jié)構(gòu)和外型都得到了充分的發(fā)展,其可分為以下幾類:
(1)按自由度的數(shù)目分類,并聯(lián)機器人可做F自由度(DOF)操作,則稱其為F自由度并聯(lián)機器人。例如:一并聯(lián)機器人有六個自由度,稱其為6-DOF并聯(lián)機器人。冗余并聯(lián)機器人,即其自由度大于六的并聯(lián)機構(gòu)。欠秩并聯(lián)機器人,即機構(gòu)的自由度小于其階的并聯(lián)機構(gòu)。
(2) 按并聯(lián)機構(gòu)的輸入形式分類,可將并聯(lián)機器人分為:線性驅(qū)動輸入并聯(lián)機器人和旋轉(zhuǎn)驅(qū)動輸入并聯(lián)機器人。研究較多的是線性驅(qū)動輸入的并聯(lián)機器人,這種類型的機 器人位置逆解非常簡單,且具有唯一性。旋轉(zhuǎn)驅(qū)動輸入型并聯(lián)機器人與線性驅(qū)動輸入并聯(lián)機器人相比,具有結(jié)構(gòu)更緊湊、慣量更小、承載能力相對更強等優(yōu)點;但它 的旋轉(zhuǎn)輸入形式?jīng)Q定了位置逆解的多解性和復雜性。
(3)按支柱的長度是否變化分類,可將并聯(lián)機器人分為:一種為采用可變化的支柱進行支撐上下平 臺的并聯(lián)機器人。例如:這種六桿的并聯(lián)機器人稱為Hexapod,運動平臺和基座由六個長度可變化的支柱連接的,每個支柱的兩端分別由鉸鏈連接在運動平臺 和基座上,通過調(diào)節(jié)支柱的長度來改變運動平臺的位姿。另一種為采用固定長度的支柱進行支撐上下平臺的并聯(lián)機器人。例如:這種六桿的并聯(lián)機器人稱為 Hexaglide,運動平臺和基座是由六個長度固定的支柱連接的,每個支柱一端由鉸鏈連接在運動平臺上,另一端通過鉸鏈連接在基座上,該端鉸鏈可沿著基 座上固定的滑道上下進行移動,由此來改變運動平臺的位姿。
4、并聯(lián)機器人的運動學分析
運動學中的主要參數(shù):位置、位移、速度、加速度 和時間。運動學分析主要研究并聯(lián)機構(gòu)正逆解問題。當給定并聯(lián)機器人上平臺的位姿參數(shù),求解各輸入關(guān)節(jié)的位置參數(shù)是并聯(lián)機器人運動學位姿反解問題。當給定并 聯(lián)機器人各輸入節(jié)點的位置參數(shù),求解并聯(lián)機器人上平臺的位姿參數(shù)是并聯(lián)機器人的運動學正解問題。與串聯(lián)機器人相反,并聯(lián)機器人位置逆解比較容易,而正解非 常復雜。最為普遍的研究方法有兩種:數(shù)值解法和解析解法[9]。
數(shù)值解法數(shù)學模型簡單,可以求解任何并聯(lián)機構(gòu),但是不能求得機構(gòu)的所有位置解。學者們使用了多種降維搜索算法,來獲得位置正解。
數(shù)值解法是指求解一組非線性方程,非線性方程是矢量環(huán)方程經(jīng)過一些具體結(jié)構(gòu)的代數(shù)處理后,直接導出的,從而求得與輸入位移對應的運動平臺的位置和姿態(tài)。由 于其省去了煩瑣的數(shù)學推導,計算方法簡單,但此方法計算速度較慢,不能保證獲得全部解,并且最終的結(jié)果與初值的選取有關(guān)。黃真早在1985年就提出對于含 三角平臺的并聯(lián)機構(gòu)可以簡化為只含有一個變量的非線性方程一維搜索法,明顯地提高了求解速度[3]。西南交大陳永等提出了一種基于同倫函數(shù)的新迭代法,不 需選取初值并可求出全部解[4]。該方法用于求解一般的6-SPS并聯(lián)機構(gòu)的位置正解,較方便的求出了全部40組解。
解析法是通過消元法消去機構(gòu)約束方程中的未知數(shù),從而獲得輸入輸出方程中僅含一個未知數(shù)的多項式。該方法能夠求得全部的解。輸入輸出的誤差效應可以定量地表示出來,并可以避免奇異問題,在理論和應用上都有重要意義。
北京工業(yè)大學的饒青等利用機構(gòu)的幾何等同性原理建立正解的基本方程,最后推導出了一個20階的一元位移輸入輸出方程,從而得到了封閉正解。
5、并聯(lián)機器人動力學分析
動力學是研究物體的運動和作用力之間的關(guān)系,并聯(lián)機器人是一個復雜的動力學系統(tǒng),存在著嚴重的非線性,由多個關(guān)節(jié)和多個連桿組成,具有多個輸入和輸出,他們 之間存在著錯綜復雜的耦合關(guān)系。因此,要分析機器人的動力學特性,必須采用非常系統(tǒng)的方法。現(xiàn)有的分析方法很多,有拉格朗日(lagrange)方法,牛 頓·歐拉(Newton·Euler)方法,高斯(Gauss)方法,凱恩(Kane)方法,旋量(對偶數(shù))方法和羅伯遜·魏登堡 (Roberson·Wittenburg)方法等。早期進行動力學的討論是Ficher和Merlet,在忽略連桿的慣性和關(guān)節(jié)的摩擦后,得出了 Stewart機器人的動力學方程。Do和Yang通過Newton-Euler法,在假定關(guān)節(jié)無摩擦,各支桿為不對稱的細桿(即重心在軸上且 繞軸向的轉(zhuǎn)動慣量可以忽略)條件下,完成了Stewart機器人的逆動力學分析。
6、奇異結(jié)構(gòu)分析
當機器人機構(gòu)處于某些穩(wěn)定的 形位時,其雅克比(Jacobian)矩陣成為奇異陣,行列式為零,這時機構(gòu)的速度反解不存在,機構(gòu)的這種形位就稱為奇異形位。并聯(lián)機器人特征之一是高剛度,然而,若并聯(lián)機器人在奇異位移時,會造成很大的問題。因為機器人在處于該位置時不能承受任何負載,其操作平臺具有多余的自由度,機構(gòu)將失去控制。因 而,在設(shè)計和使用并聯(lián)機器人時,必須將奇異位姿排除在工作領(lǐng)域之外。
另一種方法是奇異位置方程,通過求解該方程來確定奇異位置。Shi和Fenton應用正瞬態(tài)運動學方程來確定奇異矩陣。Sefrioui和Gossellin針對一平面的3-DOF并聯(lián)機器人推導出奇異軌跡的解析表達式。
Fitcher發(fā)現(xiàn)了Stewart平臺機構(gòu)的奇異位置:即運動平臺平行基座時,繞Z軸旋轉(zhuǎn)± 的位置。機構(gòu)奇異形位可以通過分析機構(gòu)的雅克比矩陣行列式等于零的條件求得。
7、工作空間分析
工作空間分析是設(shè)計并聯(lián)機器人操作器的首要環(huán)節(jié)。機器人的工作空間是機器人操作器的工作區(qū)域,是衡量機器人性能的重要指標。根據(jù)操作器工作時的位姿特點,工 作空間可分為可達工作空間和靈活工作空間。可達工作空間是指操作器上某一參考點可以到達的所有點的集合,這種工作空間不考慮操作的位姿。靈活工作空間是指 操作器上某一參考點可以從任何方向到達的點的集合。
并聯(lián)機器人的一個最大弱點是空間小,應該說這是一個相對的概念。同樣的機構(gòu)尺寸,串聯(lián)機器人比并聯(lián)機器人工作空間大;具備同樣的工作空間,串聯(lián)機構(gòu)比并聯(lián)機構(gòu)小。
并聯(lián)機器人工作空間的解析求解是一個非常復雜的問題,它在很大程度上依賴于結(jié)構(gòu)位姿解的研究成果,至今仍沒有完善的方法。Ficher采用固定6個位姿參數(shù) 中的3個姿態(tài)參數(shù)和一個位置參數(shù),而讓其他兩個交換研究了6自由度并聯(lián)機器人的工作空間。Gosselin則利用圓弧相交的方法來確定6自由度并聯(lián) 機器人的定姿態(tài)工作空間,并給出了工作空間的3維表示。此法以求工作空間的邊界為目的,效率較高,且可以直接計算工作空間的體積。
8、展望
并聯(lián)機器人雖然經(jīng)過了幾十年的研究,取得了很大的進展,但是還有大量的工作需要進一步研究。
(1)探索力冗余度Stewart平臺機器人的冗余度解決方案。
(2)并聯(lián)機器人工作空間及奇異位形的研究。
(3)并聯(lián)機器人的動力學理論和試驗研究。
(4)并聯(lián)機器人的模塊化設(shè)計。
(5)加強少自由度并聯(lián)機器人的研究。
(6)基于良性工作空間(Well-Conditioned Workspace)的Stewart機器人的運動學優(yōu)化綜合。








 在線咨詢
在線咨詢 




