 400 025 3599
400 025 3599 




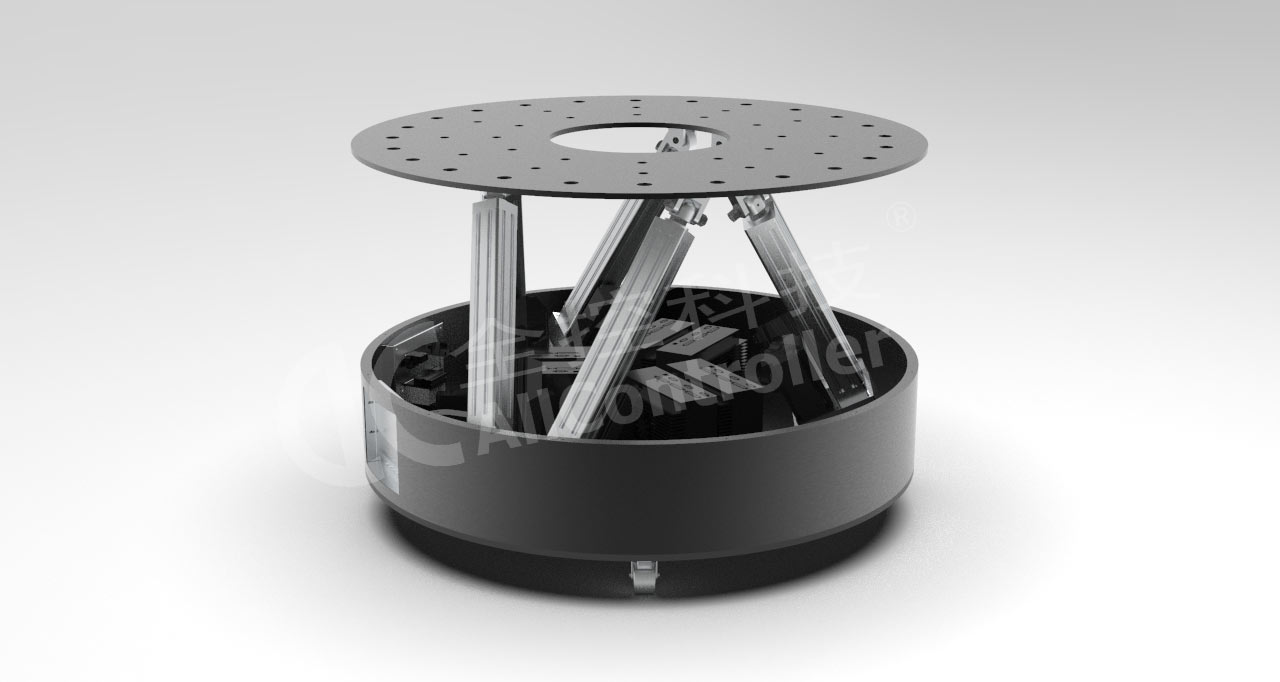
六自由度運動仿真平臺模擬器系統的組成是由Stewart多自由度運動平臺,計算機控制系統,電機驅動系統等組成。底部平臺固定在地面上,頂部平臺用于支撐負載。通過計算機控制系統被編程為控制電動線性致動器的行程和速度,以實現運動平臺在三維空間中的多自由度運動 。具體地說,運動平臺可以自由地改變 位置, 例如 在三個 垂直軸上向前/向后(喘振),向上/向下(升沉),向左/向右(搖擺) 平移 ,并且通常通過繞三個垂直軸旋轉來改變方向稱為偏航(法向軸),俯仰(橫軸)和橫滾(縱軸)。
六自由度Stewart運動平臺具有以下特點:
1、南京全控六自由度平臺由六個氣缸同時支撐,剛性比串聯機構的懸臂梁大,結構穩定,在相同自重或體積下具有高于串聯機構的承載能力。
2、串聯機構末端零件的誤差是各關節的誤差積累和放大,因此精度低、誤差大,而采用并聯機構的六自由度平臺由于沒有誤差積累和放大,所以誤差小、精度高。
3、六自由度平臺采用對稱型結構,各向同性好。
4、關于位置求解,串聯機構很容易求出正解,但求逆解非常困難,使用并聯機構的六自由度平臺很難求出正解,求逆解非常容易,在線計算要求逆解,而并聯機構容易實現。
5、軟件部分主要包括用戶接口程序、伺服算法程序、PID參數設定程序等。
6、電子控制部的作用是接收從控制系統輸出的指令數據,并將其傳輸到伺服驅動器,司機放大信號控制電機的動作,帶動電動缸,最終使底座實現各種姿勢,包括機床、運動控制卡、伺服驅動器、伺服電機、電阻表及相關電氣部件等。
7、機器部分用于支撐載荷,包括上平臺、上連接鉸鏈、下連接鉸鏈、電動缸、支撐架、基座等,平臺由電動缸驅動,進行橫向渦旋、偏航、俯仰3種姿勢和x、y、z平移共六自由度的運動。
8、在六自由度平臺的驅動系統中,伺服電動缸省略了中間的能量轉換環節,使電機直接產生力和力矩,從而確定運動過程高效,具有體積小、響應快、使用方便、成本低的優點,不需要復雜的配管系統。
六自由度Stewart運動平臺的主要應用:
1、運動模擬(飛行模擬、駕駛模擬、道路模擬、海浪模擬、地震模擬、空間對接地面試驗);
2、并聯機床;
3、并聯機器人精密定位裝置(微動機構、大規模集成電路加工、并聯挖掘機械、空間裝配機械手、大型望遠鏡、照相機聚焦等);
4、六維力矩傳感器;
5、隔振平臺(利用它的快速響應能力)。
六自由度Stewart運動平臺的主要功能:
1、可實現位置模擬、正弦波模擬、單自由度和多自由度復合的正弦運動;
2、可實現對海浪譜、路譜和飛行譜的運動復現;
3、可將運動坐標系原點平移到試件的某一點;
4、具有精確零位鎖定和運動范圍內的任意位置鎖定功能;
5、控制系統采用實時控制,控制系統應能實時記錄六自由度平臺臺體運動參數并以三維動畫重現試驗過程;
6、具有獨立的實時測量系統。








 在線咨詢
在線咨詢 




