 400 025 3599
400 025 3599 




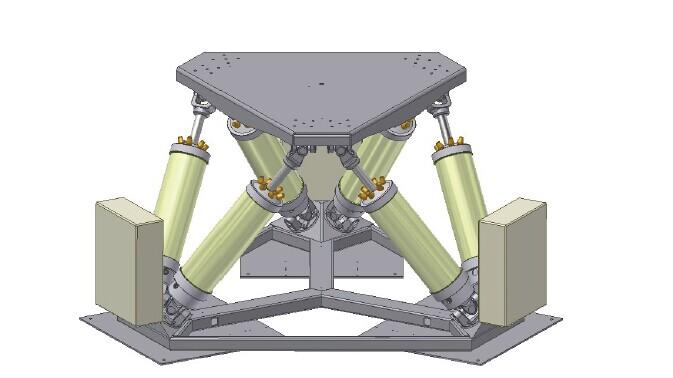
六自由度運動平臺,由上、下平臺和六個可伸縮的電動缸組成。上、下平臺與電動缸之間,分別通過虎克鉸或球鉸相連,因此上、下平臺分別有6個連接點。上平臺為動平臺,在六個電動缸的驅動下進行空間中的六自由度運動,下平臺為靜平臺,靜止不動,上、下平臺為相似的六邊形,如下圖所示。六自由度并聯機構具有速度快、負載大、精度高等特點,該結構作為運動平臺有著廣泛的應用空間。。另外,還有六自由度搖擺臺的基本功能大家了解嗎?包括運動姿態模擬、運動參數設定和運動信息顯示功能這三個功能,下面來看看具體的分析介紹吧。
六自由度運動平臺的算法
六軸定位系統強調的是六軸以及定位。六軸指能完成六個自由度運動的電動設備。具體包括XY水平運動,z上下運動,旋轉,以及兩個方向上的搖擺。
定位是指對運動精度有要求的設備。并聯是指系統中所有運動機構同時運動實現一個目標位置。串聯是指系統中運動機構獨立運動,到一個目標位置。
并聯的結構常見的是六個腿,六個支點同時推動一個運動面,變腿長式或者單腿加關節;也有tripod結構,三條腿,一個支點,每個單腿另加XY平移機構。
串聯則較為簡單,六個獨立工作的平臺疊加到一起運動。關于優缺點:六軸并聯系統優點在于體積緊湊,沒有那么多線。串聯結構一層一層臺子,疊六層,每加一層,對底層臺子的負載能力要求就增加一些,體積也會變大。串聯結構的臺子負載能力不及并聯的。
并且六個臺子有十幾根線做通訊和供電用的,非常混亂。六軸并聯機構是通過一個矩陣換算方式分解一個目標位置的。所以可以很好的避免疊加誤差,提高重復精度。
串聯結構的優點就比較簡單啦。并聯的旋轉是無法360度無限制旋轉的,并聯結構各個自由度的行程是非常受限的,串聯就不會。并且如果不是非要六軸,只要4軸或者5軸,串聯就可以比較隨意的增減搭配。
六自由度運動平臺的功能設計
從控制角度看,六自由度運動平臺控制系統是一種電動伺服控制系統。要對其進行控制系統的總體設計,就必須先明確該系統的結構特性與工作原理,分析該系統應當包含的功能模塊。然后基于其功能需求,設計出整個系統所需的硬件模塊,畫出控制系統構成圖。而后對硬件部分和軟件部分分別進行設計和規劃,從而完成六自由度運動平臺控制系統的總體功能設計。
在實際控制過程中,主控單元需要頻繁地執行正反解、軌跡規劃求解等計算任務,且這些任務的計算量都比較大。此外,完備的控制系統還應包括人機交互、實時數據存儲等功能。
(1)位置控制:本文采用的控制方式主要是位置控制,當系統發出指令時,平臺的六個電動缸能夠按照指令,在系統限定范圍內進行伸縮運動,使運動平臺實現空間中六個自由度的目標運動。
(2)限位系統:當六自由度運動平臺的某個電動缸超過其運動范圍時,必須有限位系統檢測到這一問題,即刻將限位信號反饋至上位控制系統,系統發出警報,并執行相應保護措施。
(3)伺服警報:當六自由度運動平臺出現超載警報、電池警報、編碼器通信警報、振動檢測警報、散熱系統過熱警報等問題,系統會立即發出伺服警報,通過關閉伺服或指令脈沖禁止輸入等動作,將伺服電機關閉,及時地保護運動平臺。
(4)人機界面:控制系統需提供一個用戶使用的界面,操作簡明,方便控制,該界面應包含:控制方案選擇、參數初始化、基本指令輸入輸出等;平臺的位置姿態和電動缸伸縮量、速度等反饋參量及其運動曲線的同步顯示;伺服控制系統當前運行狀態等。
(5)急停裝置:當系統發出嚴重故障問題警報時,若不能利用控制按鍵及時停止平臺的運動,可以通過急停裝置,直接切斷整個系統電源,令平臺立即停止運動,避免運動平臺受到碰撞損壞等嚴重事故的發生。
(6)尋零、定位:在人機界面上需要有控制按鍵,可以令平臺自動回歸到零點位置,或定位到空間限定范圍內的任一位置。
(7)自動檢測:系統通電之后,即刻開始檢測伺服控制系統各個構成模塊是否正常運行,并將檢測結果及時向上位機反饋報告。
看了上面的介紹,關于六自由度運動平臺的算法及功能設計大家應該都有所了解,如果大家想了解更多關于六自由度運動平臺的知識可以隨時聯系我們。








 在線咨詢
在線咨詢 




