 400 025 3599
400 025 3599 




依據運動學結構,可將機器人分為串聯機器人、并聯機器人和混合機器人三大類別。其中,串聯機器人由一組開環運動鏈組成,并聯機器人由一些閉環運動鏈組成,混合機器人則同時包含了開環和閉環運動鏈。
雖然并聯機器人出現時間較串聯機器人晚,但其無論在學術理論,還是實際應用上都填補了一些行業空白。在發展歷史中,并聯機器人的優點正被慢慢凸顯出來。
具體來看,串聯機器人是工業應用場景中最常用的類別,其主要優點是對于自身體積和所占的地面范圍,具有很大的工作空間,缺點是其由于開環運動學結構所帶來的較低剛度和較大慣性。
反觀并聯機器人,由于其閉鏈的運動結構,具有高剛度,高承載力;且驅動電機多安裝于定平臺,故具有慣性小,速度快的優點。再加上某些機器人的特定工作空間,并聯機器人在實際工程中找到了獨特的用武之地。
Stewart機器人
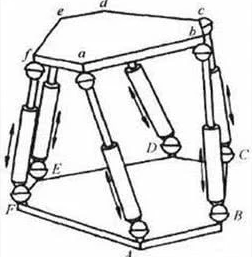
Stewart機器人可以說是最經典的并聯機器人,也是世界上出現的第一種并聯機器人。這類機器人最初由Gough在1947年發明,被用于檢測各種載荷條件下的輪胎磨損。
將Stewart與Gough聯系在一起是源于Stewart在1965年發表的一篇論文中,提及了Gough的工作和這種平臺的圖像,這篇論文對并聯機器人運動學的發展產生了重要的影響。基于此,這類構型的并聯機器人也被稱為Gough-Stewart機器人。
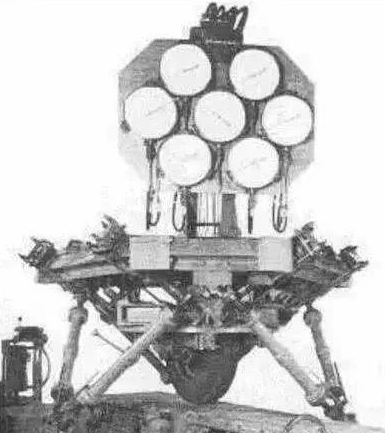
Gough發明的六自由度平臺
該機器人為六自由度,有六條支鏈,每條支鏈的兩端為球副,中間由一移動副聯接兩桿。由于其剛度高和重負載的優點,Stewart機器人常被用于各種重載的模擬臺,例如飛行模擬器、地震模擬臺、航天對接裝置,以及用于確定組合載荷下輪胎的性能等;在民用方面的應用包括電影座椅等。
飛行模擬器
Delta機器人
另一種具有跨時代意義的并聯機器人——Delta機器人發明于20世紀80年代,發明人為Reyrnond Clavel。這種新型機器人發明的初衷是,以非常高的速度操縱輕而小的物體。1991年,Reyrnond Clavel提交了自己的博士論文,同時為Delta機器人申請了專利。他在1999年獲得了金機器人獎,以表彰其在Delta機器人領域的貢獻。
1999年,ABB開始銷售Delta機器人。直到其專利在2012年解禁后,國內的機器人企業才開始生產并銷售Delta機器人。ABB也成為了現在國際上做delta機器人最成熟的公司,目前國內出貨量比較多的廠商有阿童木機器人、勃肯特機器人、李群自動化等。
Delta機器人是最經典的少自由度機器人,也是在實際工業中應用最廣泛的一種并聯機器人。三自由度Delta機器人由三條支鏈組成,其關鍵之處在于使用了平行四邊形結構,可以保證末端執行器的姿態。
Delta機器人
Delta機器人的最大優勢是速度快,業內勃肯特的高速并聯機器人標準節拍已達到433次/min,超過了國外品牌,可見Delta機器人很適合用于抓取搬運小重量物體,所以被大規模應用于食品、醫藥、3C等領域。
不僅如此,在傳統Delta機器人的基礎上,還有許多變種,在保留其高速的情況下,給予機器人更多的自由度,以滿足工程需要。
事實上,在民用領域,被大規模應用的并聯機器人只有Delta機器人和五桿機器人,而Delta機器人基本成為了并聯機器人的代名詞。即使擴展到航空航天和軍事領域,比較常用的并聯機器人也只能再加上Stewart機器人。
值得一提的是,并聯機器人的實際應用并不僅限于此,例如3-SPS-PS機器人和支鏈嵌套并聯機器人等由于其工作空間的特點,在工程應用上也有很大的潛力。
構型上的改變屬于機器人最底層的改變,而機器人行業研發成本高、周期長,工業又以營利為目標,因而更傾向于求穩,所以即使是四大家族級別的大機器人廠商,對待新的、不同構型的機器人亦十分謹慎。這也是很多并聯機器人的構型在工程實際的潛力并沒有得到完全挖掘的原因。








 在線咨詢
在線咨詢 




